MENU
Home
Add Document
Sign In
Create An Account
Research Papers - Free PDF Download
RECENT ACTIVITIES
TOP PDF
Simultaneous detection of SERS and fluorescence using a single excitation for microbead-based analysis.
Analysis of thickness of a hydrophobic fluoropolymer film based on electrowetting.
Development of a magnetic nanoparticles microarray for simultaneous and simple detection of foodborne pathogens.
Dextran-functionalized magnetic fluid mediating magnetohyperthermia combined with preventive antioxidant pequi-oil supplementation: potential use against cancer.
PAMAM dendrimer generation 5-pluronic F127 nanofilm as a matrix for local metronidazole release.
Shape control of cellulose nanocrystals via compositional acid hydrolysis.
Development of small diameter fibrous vascular grafts with outer wall multiscale architecture to improve cell penetration.
Perioperative practitioners. Does waste segregation and disposal within your theatre meet the required legal standard?
Perioperative nurses' experiences as students: the perceived status of being at university.
The general surgical care practitioner improves surgical outpatient streamlining and the delivery of elective surgical care.
Reducing the carbon footprint of the operating theatre: a multicentre quality improvement report.
René Leriche: the Leriche syndrome.
Leaders must act to prevent care apathy.
Ministers tell new training body to focus on older people's care.
Small increase in nurse numbers, but downward trend continues.
Financial strain already harming patient care, NHS leaders warn.
The Rolls-Royce of family intervention.
'We own this service'.
Aiming for excellence.
Raising awareness of polycystic ovary syndrome.
Emotional intelligence and its role in recruitment of nursing students.
Intrapleural chest drainage.
Respiratory infections.
A centre of excellence.
What's new from IADR?
The orthodontic-restorative interface in patients with hypodontia: the patient's journey.
Update on coronectomy. A safer way to remove high risk mandibular third molars.
To retrieve or not to retrieve the coronectomy root--the clinical dilemma.
Decision-making in the provision of extra-coronal restorations.
Veterinary dentistry: a clinician's viewpoint.
Invisible orthodontics part 2: lingual appliance treatment.
Making sense of sensitivity.
Oral medicine: 8. Orofacial sensation and movement.
Technique tips--'Richmond crown technique'--a newer approach for re-attachment.
New record of the biting midge Leptoconops noei in northern Spain: notes on its seasonal abundance and flying height preference.
His86 from the N-terminus of frataxin coordinates iron and is required for Fe-S cluster synthesis.
Excessive Daytime Sleepiness and Sleep Disorders in a Population of Patients with Epilepsy: a Case-Control Study.
The Physicians' Case for Marijuana Legalization.
Fast epitope mapping for the anti-MUC1 monoclonal antibody by combining a one-bead-one-glycopeptide library and a microarray platform.
ASGCT 19th Annual Meeting: Author Index.
63(RD) ASMS Conference on Mass Spectrometry and Allied Topics.
ASGCT 19th Annual Meeting: Abstracts.
High dose of nimustine as an add-on treatment for small cell lung cancer with intracranial metastasis: A case report and literature review.
Ctenophore trees.
Epidemiology and Outcomes of Infectious Spondylodiscitis in Hemodialysis Patients.
Poster sessions.
Utility of osteosclerotic lesion biopsy in diagnosis of POEMS syndrome: A case report.
Simultaneous Determination of Six Benzodiazepines in Spiked Soft Drinks by High Performance Liquid Chromatography with Ultra Violet Detection (HPLC-UV).
Cornoid Lamellation Associated With Lichen Sclerosus.
Poster presentations.
Pott's puffy tumor in a 12-year-old boy.
Investigations of riboflavin photolysis via coloured light in the nitro blue tetrazolium assay for superoxide dismutase activity.
Supplement.
Simultaneous detection and quantification of six equine cytokines in plasma using a fluorescent microsphere immunoassay (FMIA).
[Medicinal plants in France, between pharmacy and herb trade: historical and legislative aspects].
Effects of proprioceptive neuromuscular facilitation neck pattern exercise on the ability to control the trunk and maintain balance in chronic stroke patients.
Persistent Unexplained Dyspnea: A Case of Hepatopulmonary Syndrome.
Chronic obstructive pulmonary disease, hospital visits, and comorbidities: National Survey of Residential Care Facilities, 2010.
Improvement of Diffusion Tensor Imaging (DTI) Parameters with Decoppering Treatment in Wilson's Disease.
Sunday, june 27, 2010: poster session 2.
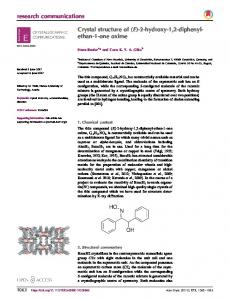
Crystal structure of (E)-2-hy-droxy-1,2-di-phenyl-ethan-1-one oxime.
The real climate debate.
Dual Catalysis Strategies in Photochemical Synthesis.
Differences in renal stone treatment and outcomes for patients treated either with or without the support of a ureteral access sheath: The Clinical Research Office of the Endourological Society Ureteroscopy Global Study.
Risks and Benefits of Ceasing or Continuing Anticoagulant Medication for Image-Guided Procedures for Spine Pain: A Systematic Review.
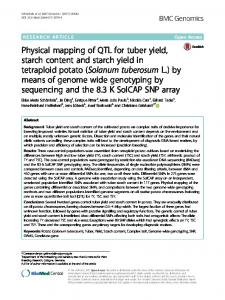
Physical mapping of QTL for tuber yield, starch content and starch yield in tetraploid potato (Solanum tuberosum L.) by means of genome wide genotyping by sequencing and the 8.3 K SolCAP SNP array.
Fundamentals of Orthodontic Treatment Mechanics.
8th IAS Conference on HIV Pathogenesis, Treatment and Prevention (IAS 2015).
Unpredictability of fighter pilots' g duration tolerance by anthropometric and physiological characteristics.
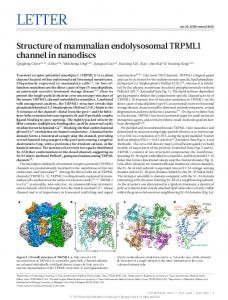
Structure of mammalian endolysosomal TRPML1 channel in nanodiscs.
4DGenome: a comprehensive database of chromatin interactions.
A Case of Priapism.
1
2
3
4
5
6
»
×
Sign In
Login with Facebook
Don't have an account?
Forgot Password?
×
Sign Up
By clicking register, I agree to your terms

















![[Medicinal plants in France, between pharmacy and herb trade: historical and legislative aspects].](https://d.docksci.com/img/300x300/medicinal-plants-in-france-between-pharmacy-and-he_5a579dd2d64ab2da5f1250f0.jpg)